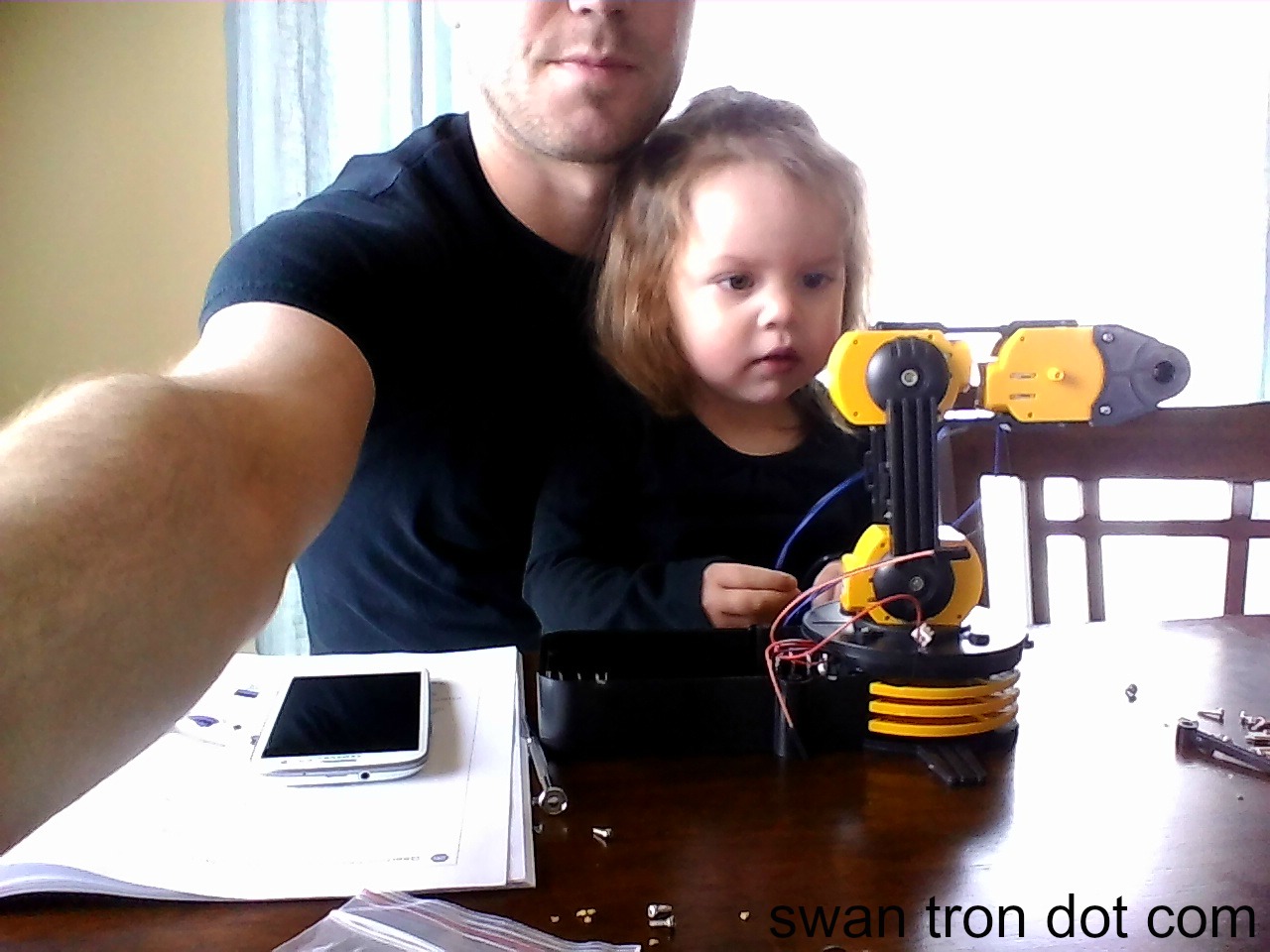
The small lab assistant and I tackled the robot arm project last weekend. Fifty percent of team swan tron embarked upon the assembly phase wearing bunny slippers…

We did this in two big chunks, due to attention span limitations and nap purposes.
Testing Phase 1)
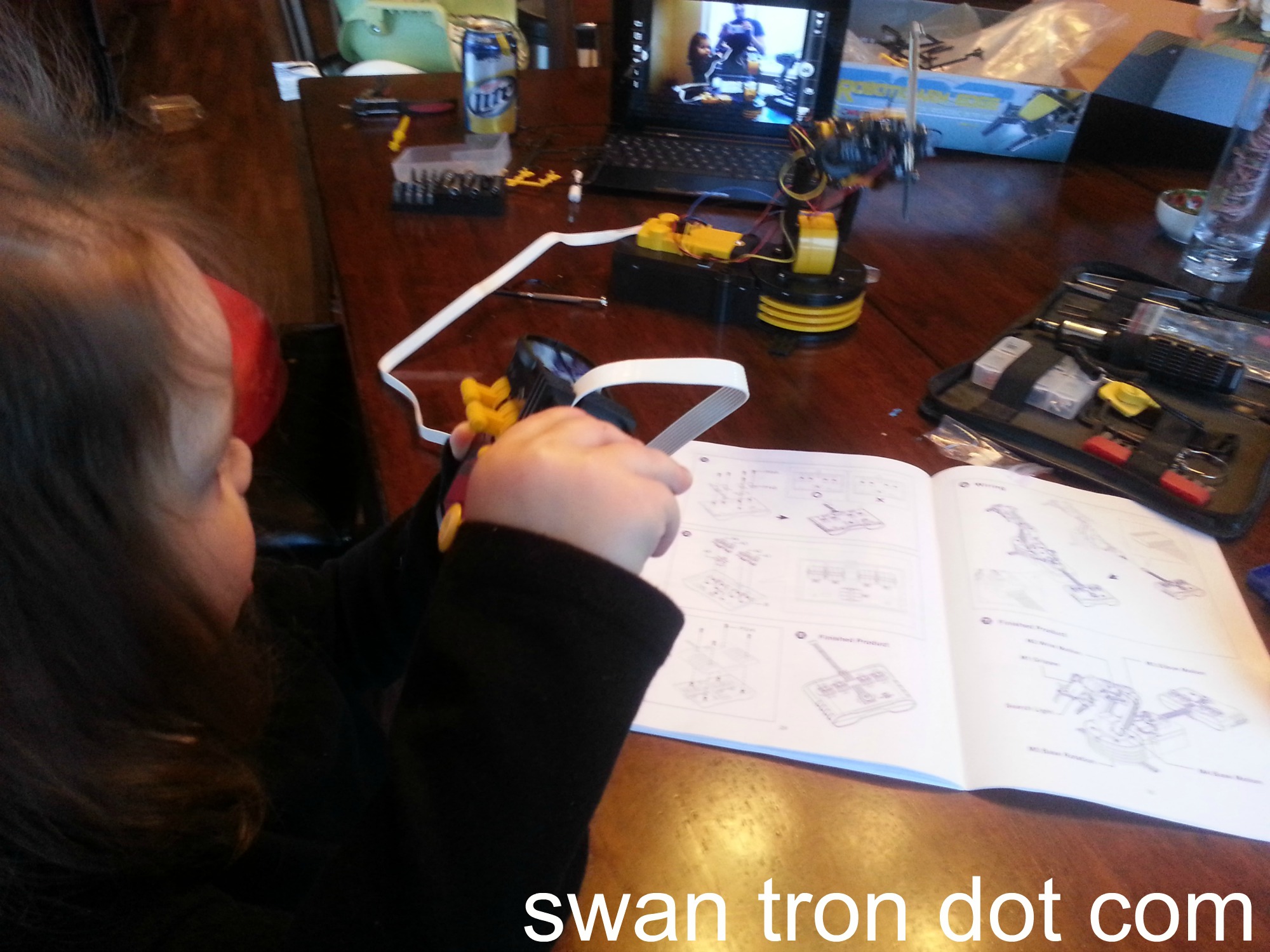
Testing Phase 2)

Emma figured out the remote pretty quickly, especially considering she has interfaced nearly exclusively with touch screen UIs. That may be next, in a round-about way. I’d like to stick some rPi brains in this and build a web UI, so the small assistant can run this with a phone or tablet. We’ll see where we end up with this.